In the last article, KeyPoint Distribution, I showed the QuadTree class code and the KeyPoint Distribution algorithm. Next we will compute the orientation for each keypoint to achieve rotation invariance.
The KeyPoint Orientation code has been uploaded to my GitHub repository. Readers are welcome to view it.
Table of Contents
KeyPoint Orientation
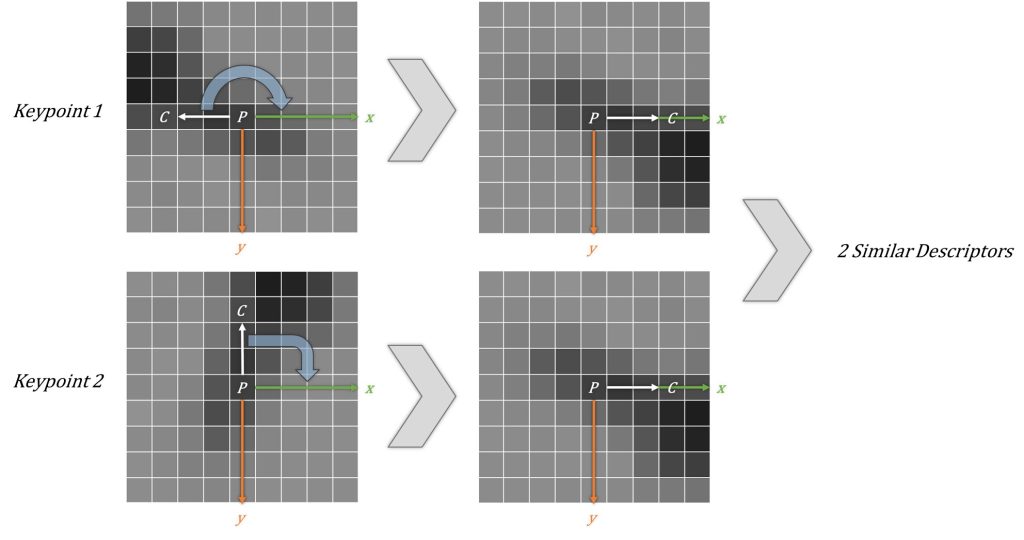
The article, Techniques of KeyPoint Extraction, mentions that descriptors are used for matching keypoints from different images. Before computing the descriptor for a keypoint, its intensity centroid is used to determine the orientation, accounting for camera rotation.
Compute Orientation
Preparation
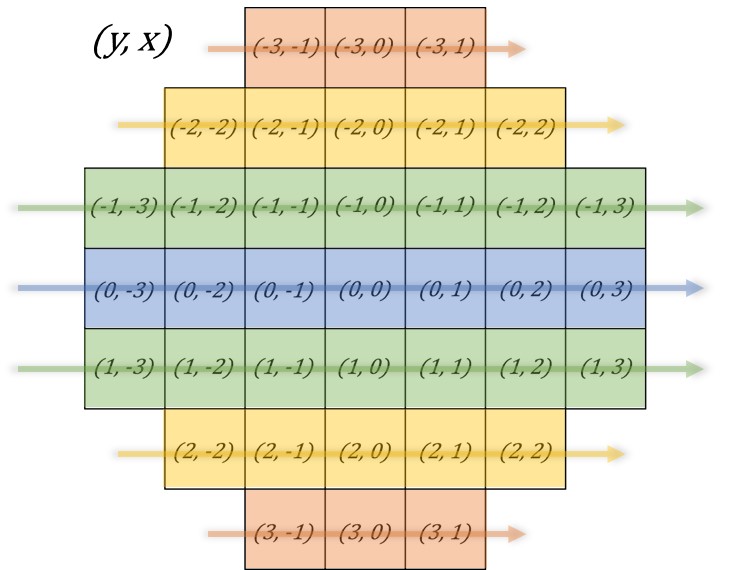
Before calculating orientation, it’s important to set a radius, for example, 31 as in ORB-SLAM2. Next I will use a radius of 3 as shown in Fig. 2 to explain this process for simplicity.
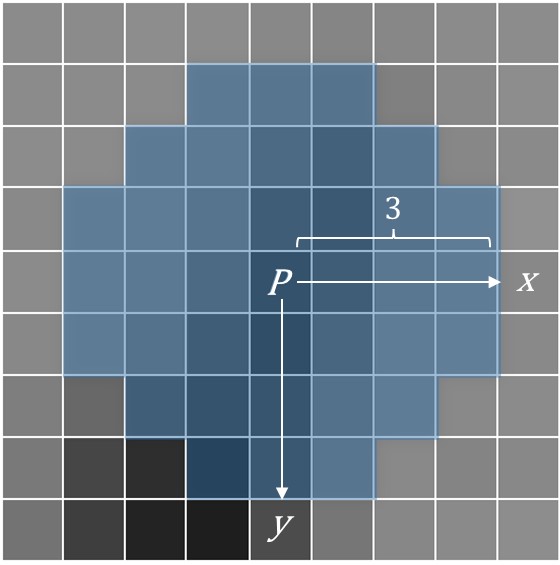
has an intensity value from 0 to 255.
Calculation
Vector from P to C
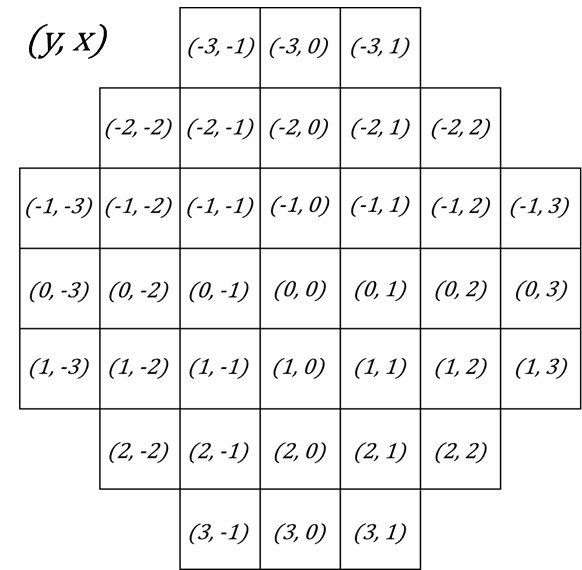
Each coordinate, shown in Fig. 3, is multiplied by its intensity value, referred to as its weight; the weighted coordinates are then summed.
$$ k\vec{PC} = k[C_y,C_x] = \sum_{y=-3}^{y=3} \sum_{x=-3}^{x=3} W_{yx} \cdot \vec{P}_{yx} \tag{1} $$
In equation (1), \( k \) is a constant; \( \vec{PC} \) represents the vector from \(P\) to intensity centroid; \( [C_y,C_x] \) represents the centroid coordinate; \( W_{yx} \) represents the intensity at \( (y,x) \), and \( \mathbf{P}_{yx} \) represents a vector \( [y,x] \).
Note that the area is circular rather than square.
Orientation
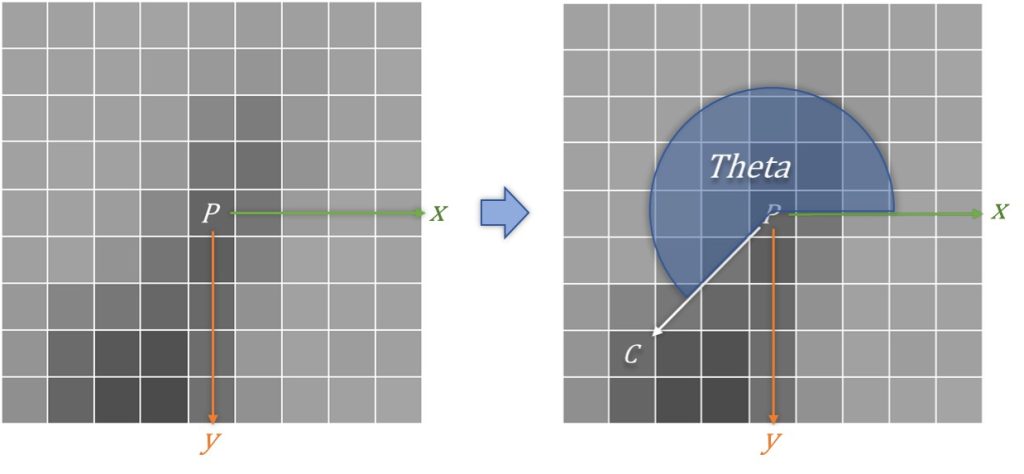
The intensity centroid determines the \( \theta \in [0^\circ, 360^\circ] \), as shown in Fig. 4, using the following equation:
$$
\theta =
\arctan\frac{C_y}{C_x}
\in [-90^\circ, 90^\circ]
\tag{2}
$$
In equation (2), \(180^\circ\) should be added to \(\theta\) to ensure \( \theta \in [0^\circ, 360^\circ] \) if \(C_x < 0\).


[…] the last article, I explained the concept of keypoint orientation. Now, let’s implement the algorithm to […]